About The Project
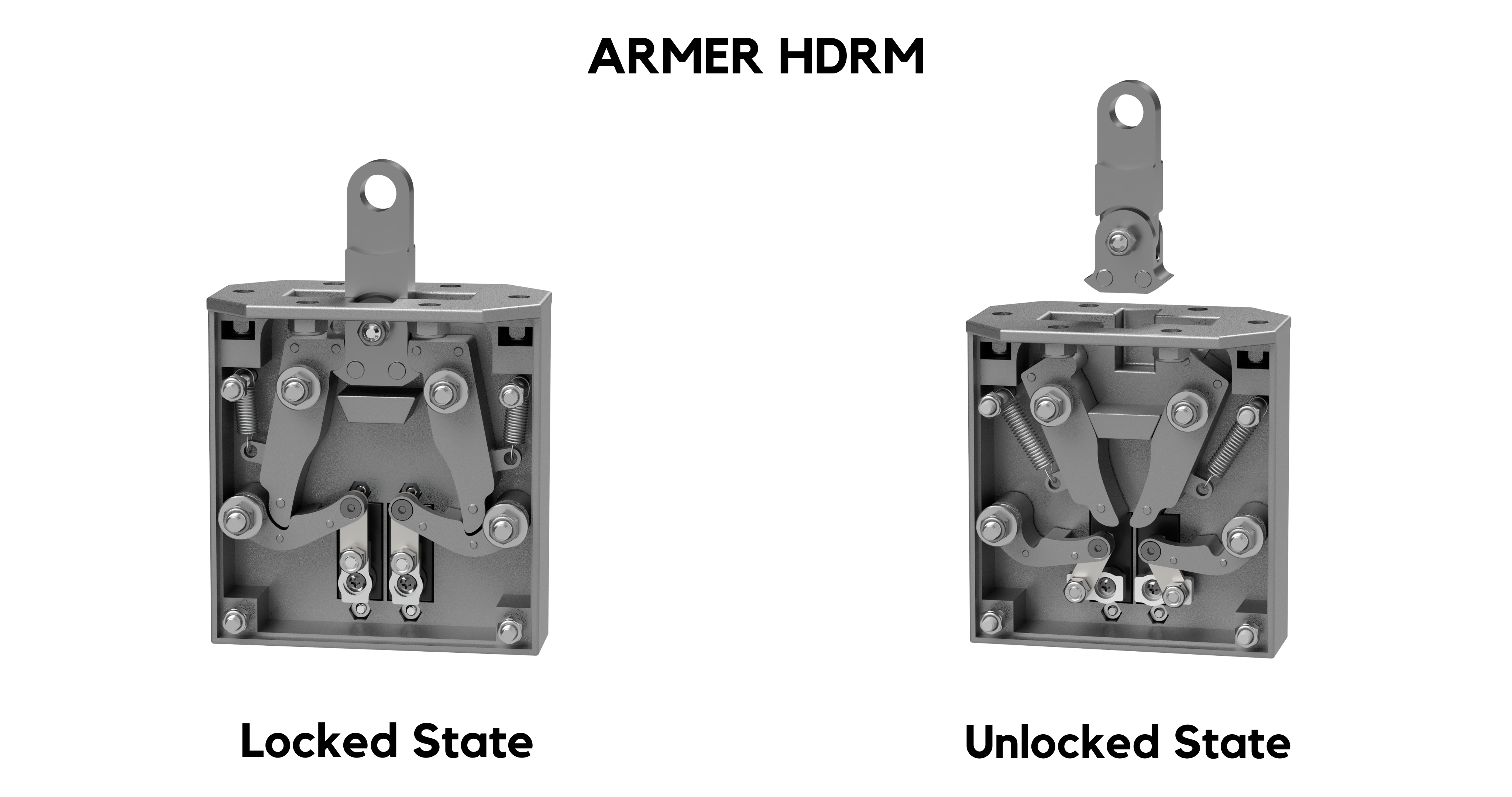
The HDRM mechanism consists of dual rotating, over-center latch assemblies and a deployable pin with a pivoting anchor to facilitate mechanical-redundancy during release. The latches are driven by electric actuators with in-built feedback and sensing that reliably lock, even with actuators in a de-energized state, and release a deployable within a fraction of a second.
The HDRM, having no consumable parts, is designed to be easily reset and reused for nearly unlimited pre-flight testing of mission-critical separation events. While capable of being actuated by pyrotechnic trigger signals, it also has a digital communications channel to activate, run self-diagnostics, export usage logs, and report real-time parameters and states to a central flight computer.
Five Engineering and Computer Science students from the Engineering Design Studio at NYU Abu Dhabi worked with JUCI mentors to establish the operational objectives and system characteristics of the HDRM. Rather than physically prototyping numerous iterations of the device, the team focused on solving as many operational challenges as possible using multi-domain simulations. Once mission objectives were achieved in virtual environments, the team engaged fabricators from around the globe to machine and 3D print titanium and stainless steel components for the first functional prototype.
The team tested the operational objectives of the initial HDRM prototypes by using them to couple together sections of a sounding rocket launched to a target altitude of 10,000ft in June 2023 at the Spaceport America Cup. Two identical HDRMs withstood the aerodynamic and structural loads of launch and successfully separated the rocket sections to deploy both the drogue and main parachutes. The Haloship team received 2nd place out of 158 teams for the Dr. Gil Moore Award for Innovation in rocket design, largely attributable to a strategy of extreme reusability and non-explosive parachute deployment made possible by the JUCI-developed HDRM.

 Stage FrightInternational Rocket Engineering Competition 2025
Stage FrightInternational Rocket Engineering Competition 2025
 HaloshipSpaceport America Cup 2023
HaloshipSpaceport America Cup 2023
 Hold Down Release Mechanism (HDRM)JPL Crowdsourcing Initiative
Hold Down Release Mechanism (HDRM)JPL Crowdsourcing Initiative
 CHIMEEducational Payload Built by NYU Abu Dhabi Students
CHIMEEducational Payload Built by NYU Abu Dhabi Students